Theory of Operation
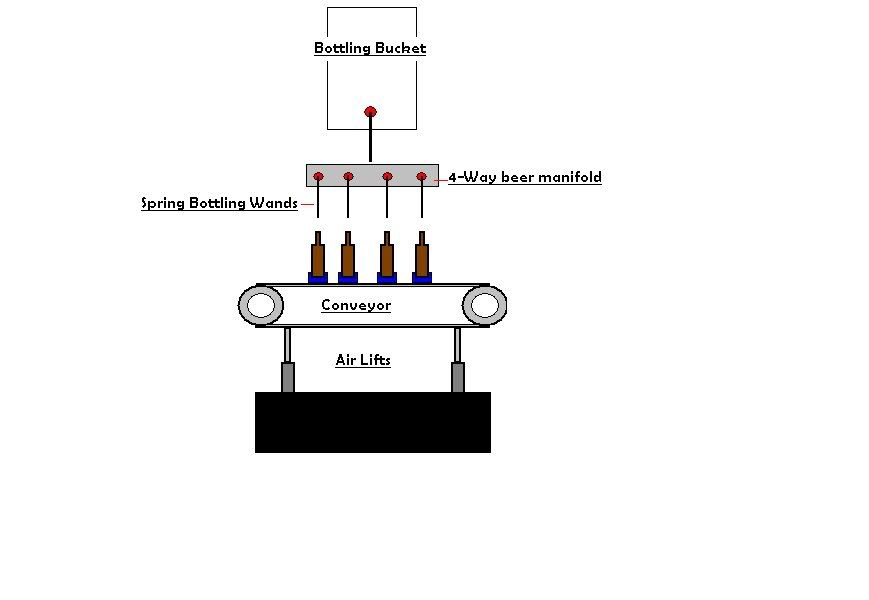
1. Use Proximity Sensors to stop conveyor when bottles are aligned under Bottling wands.
2. Air Lifts then lift conveyor table up to pre-determined height to allow bottling wands to begin dispensing beer
3. A set of contacts placed on a determined Height of one of the bottling wandswould give continuity when the beer reaches that level. These contacts closing will trigger the conveyor to begin lowering via the airlifts, stopping the flow of beer.
4. Another Proximity Sensor will determine when the conveyor is “parked” at it’s low position. Beginning the conveyor to cycle in the next 4 empty bottles and repeat the process.
5. You would need some sort of bottle catcher that would allow the bottles to slide to a capping area (manual station or another automated machine) to catch the full bottles. Or manually unload the while the next four are filling.
*There are “cups” on the conveyor that hold bottles for consistent alignment.
*All tubing from bottling bucket to manifold and manifold to bottling wands is solid tubing as to not allow any flexing.
*PLC Controlled
* This design would require consistency in bottles. ie All SA's, All Sierra Nevadas, ect
Most of this could be made from hardware store/locally available stuff.
A simple DC motor to turn conveyor
Rocker switches from radio shack
You supply the PLC or Arduino or whatever you have from control
I'll like to make this now just to see if I can........

")