There are several autotuning methods available. How difficult do you think it would be to add this sort of utility? Seems like there is a huge demand for it. Obviously you wouldn't want to autotune when mashing, but to do it once to get a ball park to how quickly your system registers temperature changes and the like.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
NEW StrangeBrew Elsinore Thread
- Thread starter DougEdey
- Start date

Help Support Homebrew Talk - Beer, Wine, Mead, & Cider Brewing Discussion Forum:
This site may earn a commission from merchant affiliate
links, including eBay, Amazon, and others.
OP
OP
DougEdey
Well-Known Member
The problem I have with autotuning is that I've seen people do it with 1 gallon in their vessel and complain it doesn't work. It's not difficult to understand how to tune it yourself then you can manually set the values depending on what you're doing, i.e. if you want to make a half batch.
OP
OP
DougEdey
Well-Known Member
Ha! Didn't realize the dev is the OP.
Don't worry, im on my way out")
Sorry, I was on my phone and the HBT app doesn't work well
I welcome the input, but I am not an Engineer I've self taught myself this stuff.
OP
OP
DougEdey
Well-Known Member
Triggers were a fantastic idea, they work great.
How about a trigger on a timer that can go out to a LED or Buzzer via GPIO.
Thanks for the wonderful software, Doug.
Just add it as a pump, the pumps are going to renamed when I get round to it, but they are just dumb GPIO toggles. So you can create one called "LED" or "Buzzer" and have it activate after a timer step.
Just add it as a pump, the pumps are going to renamed when I get round to it, but they are just dumb GPIO toggles. So you can create one called "LED" or "Buzzer" and have it activate after a timer step.
Perfect! Keep up the GREAT work!
Wasn't a buddy of yours going to release a board to make GPIO config a little easier? What's the status?
zombiekai
Member
Has anyone else had the triggers not be there when you come back to your system? I have used my set up a few times, but when i logged in last night to set for my brew day today my triggers where gone.
tried updates and pull nothing worked. New clone and its perfect again.
Thanks for all your work
tried updates and pull nothing worked. New clone and its perfect again.
Thanks for all your work
Doug,
I am on a spending hiatus from brewing equipment for a while and was wondering about some modifications to the PH_sensor java file because I don't have a DS2450 converter. However I do have a MCP3008 ADC chip.
I have it hooked up to the Pi and can read ph values from it and was wondering if you could point me in the right direction to go in order to get Elsinore to read it.
D-out is on GPIO9 but Elsinore restricts to 7. Would it be possible to select which channel to read from the MCP3008 instead of which DS2450 address?
Here is the python code that I used to get a reading:
Some sites I used to get MCP3008 info:
http://www.raspberrypi-spy.co.uk/2013/10/analogue-sensors-on-the-raspberry-pi-using-an-mcp3008/
http://raspberrypi-aa.github.io/session3/spi.html
And let me know if this is too much to ask for.
I am on a spending hiatus from brewing equipment for a while and was wondering about some modifications to the PH_sensor java file because I don't have a DS2450 converter. However I do have a MCP3008 ADC chip.
I have it hooked up to the Pi and can read ph values from it and was wondering if you could point me in the right direction to go in order to get Elsinore to read it.
D-out is on GPIO9 but Elsinore restricts to 7. Would it be possible to select which channel to read from the MCP3008 instead of which DS2450 address?
Here is the python code that I used to get a reading:
Code:
import spidev
import time
spi = spidev.SpiDev()
spi.open(0,0)
# read SPI data from MSP3008 chip, 8 possible adc's (0-7)
def readadc(adcnum):
offset = .29
if ((adcnum > 7) or (adcnum < 0)):
return -1
r = spi.xfer2([1,(8+adcnum)<<4,0])
adcout = ((r[1]&3) << 8) + r[2]
#formula to convert voltage into ph value (-.29 is my callibration offset)
adcout = float(adcout*5)/1024*3.5-0.29
return adcout
while True:
#to read all 8 adc inputs
#for adcInput in range(0,8):
#to just read channel 0
for adcInput in range(0,1):
#print "ADC(", adcInput,")=", readadc(adcInput)
print readadc(adcInput)
time.sleep(1)Some sites I used to get MCP3008 info:
http://www.raspberrypi-spy.co.uk/2013/10/analogue-sensors-on-the-raspberry-pi-using-an-mcp3008/
http://raspberrypi-aa.github.io/session3/spi.html
And let me know if this is too much to ask for.
Has anyone else had the triggers not be there when you come back to your system? I have used my set up a few times, but when i logged in last night to set for my brew day today my triggers where gone.
tried updates and pull nothing worked. New clone and its perfect again.
Thanks for all your work
Yes, same thing happens to me - no triggers, until I new clone again.
OP
OP
DougEdey
Well-Known Member
Yes, same thing happens to me - no triggers, until I new clone again.
Do either of you two see any error messages on the console when it fails to add? Either the javascript console or the terminal console?
I haven't done any updates, and the triggers are only stored until Elsinore shuts down. They are not persistent.
OP
OP
DougEdey
Well-Known Member
Doug,
I am on a spending hiatus from brewing equipment for a while and was wondering about some modifications to the PH_sensor java file because I don't have a DS2450 converter. However I do have a MCP3008 ADC chip.
Possible, but I can't do any coding until the middle of March and I don't have the MCP3008 to test with so it'd be blind.
OP
OP
DougEdey
Well-Known Member
Just so you guys know I am still working on stuff,
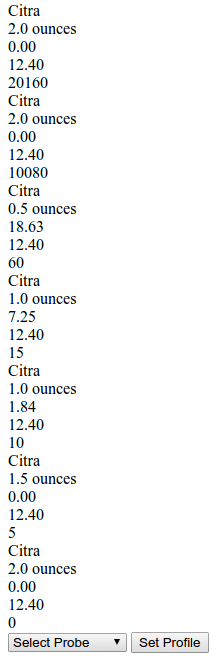
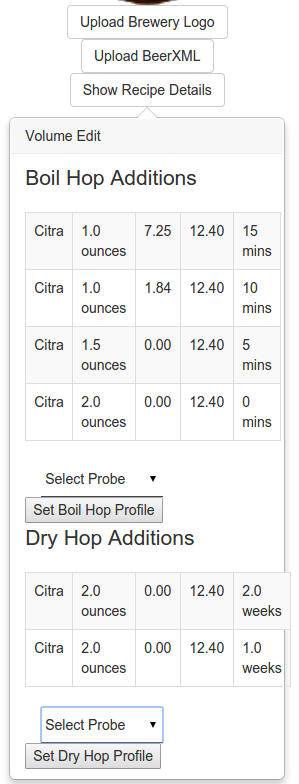
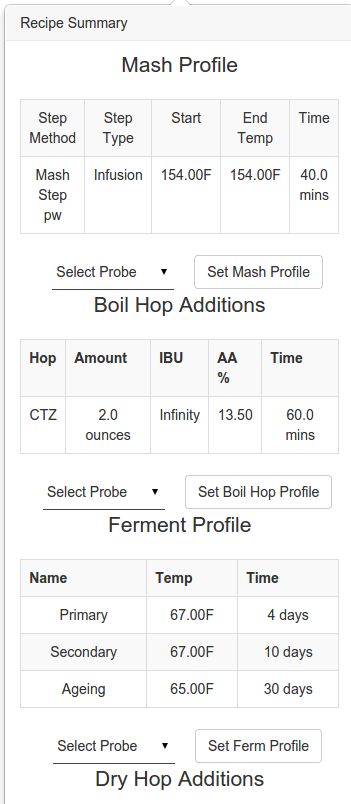
This is the first pass of viewing hop additions and the mash profile (the recipe I'm using is bad and found a load of bugs for this testing), the hop additions here are both for the boil additions and fermentation additions (about to be broken out) and there's obviously no "prettiness" yet.
This is the first pass of viewing hop additions and the mash profile (the recipe I'm using is bad and found a load of bugs for this testing), the hop additions here are both for the boil additions and fermentation additions (about to be broken out) and there's obviously no "prettiness" yet.
OP
OP
DougEdey
Well-Known Member
So, I was discussing this project with an engineering friend of mine and he pointed something (which is now immediately obvious to me) out about the beaglebone black.
It's _Single_ core. So it's slow due to the multithreading that Elsinore uses.
He has been planning to do a much more slimmed down and specific PID controller for his job and they are using the RaspberryPi 2 because it is multicore.
So, if you currently use the BeagleBone black and can live with the performance issues, you're fine, but I would recommend people use the RaspberryPi 2 instead.
It's _Single_ core. So it's slow due to the multithreading that Elsinore uses.
He has been planning to do a much more slimmed down and specific PID controller for his job and they are using the RaspberryPi 2 because it is multicore.
So, if you currently use the BeagleBone black and can live with the performance issues, you're fine, but I would recommend people use the RaspberryPi 2 instead.
JayElDubya
Well-Known Member
- Joined
- Jul 26, 2014
- Messages
- 48
- Reaction score
- 16
Only the newest pi is multi-core. Are you saying that SBE runs better on all pis (including the single-core & slower-clocked versions...not the newest) and that the BBB with its faster processor and more ram isn't advantageous for this specific application? I know its a weighted question with loss of "ifs and ors" based on implementation, but I have to think the bbb would have a leg up on the older versions of the pi.
OP
OP
DougEdey
Well-Known Member
do you see any problem using old raspberry (b+ 512mb)? Slowness apart
No, there are some people who have said OWFS doesn't work (or indicated it's not easy to setup) on the newer kernels, but I haven't look yet.
zombiekai
Member
I have no problems running on my RPi b+ when I keep it to 3 temp probes and 3 switches. I had 5 probes and used 6 SSR. I Had some issues with UI freezing up when I would try to do to much. Works great now.
I already ordered my new RPi 2.
I already ordered my new RPi 2.
OP
OP
DougEdey
Well-Known Member
More progress, this now is a popover (just need to tidy up some widths as you can see), and add the code that actually creates the triggers. Should be ready to push today or tomorrow (as well as a buttload of other changes, my changelog will be scary).
OP
OP
DougEdey
Well-Known Member
Looking good. Is the idea that the user will receive notifications for each hop addition? Perhaps a boil timer that starts when boiling temp detected?
I'll just leave this here and this too
JayElDubya
Well-Known Member
- Joined
- Jul 26, 2014
- Messages
- 48
- Reaction score
- 16
I really love where this is all heading. Looking really great Doug.
OP
OP
DougEdey
Well-Known Member
Alrighty, so a huge update is pushed to a new branch so it can be tested whilst I fix some fine tuning issues.
Features
Bug fixes
If you want to test the changes, run:
You will need to recreate the switches, (previously pumps) but everything else should be the same.
I'll upload videos when I finish fixing the minor layout issues I have left. I'll also get documentation updated over the next few days.
Features
- BeerXML can be uploaded and used to set mash profiles, boil hop timers, fermentation profiles, and dry hop timers.
- Pumps have been renamed to "Switches" to more accurately indicate what they do.
- Convert to intellIJ from Eclipse for development due to much better Git and Maven integration.
- Started to add tests
Bug fixes
- Lots of UI layout fixes/improvements (in my opinion)
- Errors from the temperature probes are now displayed correctly.
- When the data recorder is disabled, triggers are now shown correctly.
- When the UI is locked, the recorder is not disabled
- Various other minor issues I noticed and can't remember, mainly backend "wtfs"
If you want to test the changes, run:
Code:
git fetch
git checkout betaYou will need to recreate the switches, (previously pumps) but everything else should be the same.
I'll upload videos when I finish fixing the minor layout issues I have left. I'll also get documentation updated over the next few days.
noisycm
Member
Trial and error method starting from common temperature control parameters:
Kc = 2-10 (Reduce overshoot by decreasing)
Ti = 2-10 min (Reduce overshoot by increasing)
Td = 0-5 min (start with 0 especially with a noisy measurement)
(Proportional Band % = 100 / Gain; Gain of 2 = 50 PB%)
PI interaction tuning map: P = Kc, I = Ti, D = 0
Or use the FOPDT model for the scientific approach to tuning (first order plus dead-time model):
Find Kp, Tp, and Өp for your system while in manual mode.
Process Gain - Kp - How Far
Process Time Constant - Tp - How Fast
Dead time - Өp - How Much Delay
Use standard Internal Model Control correlations to arrive at the closed loop time constant, Tc.
Aggressive action: Tc is the larger of 0.1*Tp or 0.8*Өp
Moderate action: Tc is the larger of 1*Tp or 8*Өp
Conservative action: Tc is the larger of 10*Tp or 80*Өp
Plug Tc, Kp, Tp, and Өp into the following tuning parameter equations (setting these up in a spreadsheet will allow adjustments of Tc later).
Proportional: Kc = 1/Kp * (Tp+0.5*Өp)/(Tc+0.5*Өp)
Integral: Ti = Tp + 0.5*Өp
Derivative: Td = Tp*Өp/(2*Tp+Өp)
Enter Kc, Ti, and Td as P, I, and D tuning parameters. Pay attention to units.
PID Control of a heat exchanger
Kc = 2-10 (Reduce overshoot by decreasing)
Ti = 2-10 min (Reduce overshoot by increasing)
Td = 0-5 min (start with 0 especially with a noisy measurement)
(Proportional Band % = 100 / Gain; Gain of 2 = 50 PB%)
PI interaction tuning map: P = Kc, I = Ti, D = 0
Or use the FOPDT model for the scientific approach to tuning (first order plus dead-time model):
Find Kp, Tp, and Өp for your system while in manual mode.
Process Gain - Kp - How Far
Process Time Constant - Tp - How Fast
Dead time - Өp - How Much Delay
Use standard Internal Model Control correlations to arrive at the closed loop time constant, Tc.
Aggressive action: Tc is the larger of 0.1*Tp or 0.8*Өp
Moderate action: Tc is the larger of 1*Tp or 8*Өp
Conservative action: Tc is the larger of 10*Tp or 80*Өp
Plug Tc, Kp, Tp, and Өp into the following tuning parameter equations (setting these up in a spreadsheet will allow adjustments of Tc later).
Proportional: Kc = 1/Kp * (Tp+0.5*Өp)/(Tc+0.5*Өp)
Integral: Ti = Tp + 0.5*Өp
Derivative: Td = Tp*Өp/(2*Tp+Өp)
Enter Kc, Ti, and Td as P, I, and D tuning parameters. Pay attention to units.
PID Control of a heat exchanger
OP
OP
DougEdey
Well-Known Member
Ice pick
Try chrome browser. I found that on my windows setup the lock button was missing when using Firefox and Internet explorer. Wasn't a problem on my iPad.
Downloaded chrome for windows job done . I now have chrome setup on my desktop renamed as "the brewery" and it's goes direct to Elsinore when started up. Still using Firefox for general internet browsing.
Happy brewing
Mike
Fixed the lock button not appearing, I'd missed a character out, some browsers fixed it for me, but firefox/IE didn't. The changes are in the beta branch for the moment
OP
OP
DougEdey
Well-Known Member
I interface my probes with ethernet cables. Will an ethernet switch work in extending the number of probes I can connect?
I don't think so, switches normally have chips in them for filtering packet data. If you daisy chain connections, you'll be fine.
OP
OP
DougEdey
Well-Known Member
If your browser supports Web Notifications (https://developer.mozilla.org/en-US...Using_Web_Notifications#Browser_compatibility), basic notification support has been added.
JayElDubya
Well-Known Member
- Joined
- Jul 26, 2014
- Messages
- 48
- Reaction score
- 16
I interface my probes with ethernet cables. Will an ethernet switch work in extending the number of probes I can connect?
No. Ethernet switched are designed to handle Ethernet frames, your sensors speak 1-wire, not Ethernet. However, the beauty with 1-wire is that you can have hundreds of sensors all on one wire. Each sensor will need a +5v and a ground, both of which can be shared like any other DC device and also a data line which can be tied to the data line of all of your other 1-wire devices. My point is, you don't need a switch at all, just add more rj45 ports to your control box, tie the +5v lines together, tie the grounds together, and tie the data lines together. You'll only be using 1 gpio port on your pi/bbb.
JayElDubya
Well-Known Member
- Joined
- Jul 26, 2014
- Messages
- 48
- Reaction score
- 16
Dupe.
JayElDubya
Well-Known Member
- Joined
- Jul 26, 2014
- Messages
- 48
- Reaction score
- 16
Dupe.
No. Ethernet switched are designed to handle Ethernet frames, your sensors speak 1-wire, not Ethernet. However, the beauty with 1-wire is that you can have hundreds of sensors all on one wire. Each sensor will need a +5v and a ground, both of which can be shared like any other DC device and also a data line which can be tied to the data line of all of your other 1-wire devices. My point is, you don't need a switch at all, just add more rj45 ports to your control box, tie the +5v lines together, tie the grounds together, and tie the data lines together. You'll only be using 1 gpio port on your pi/bbb.
Thanks, I wasn't quite sure how ethernet switches worked. I understand the simplicity of one wire. Basically I was looking for simple external box I could use to do this instead of performing surgery on my control panel. I do have more ports available on my control panel, just wish I wired them up in the first place.

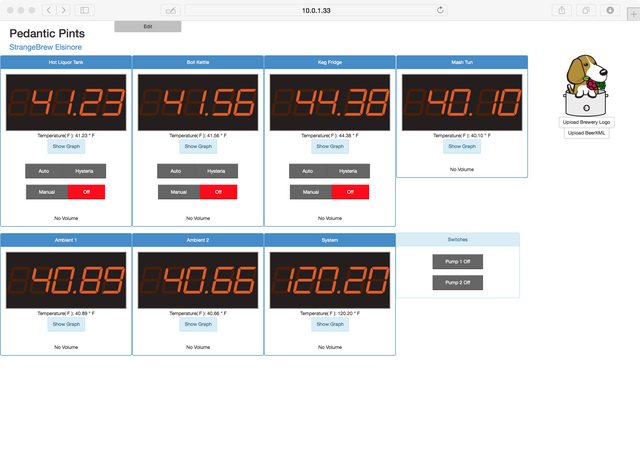
Wasn't as tight as I thought it was, was able to make full use of my patch panel... now I can have 7 temp probes.. but who has that many anyways
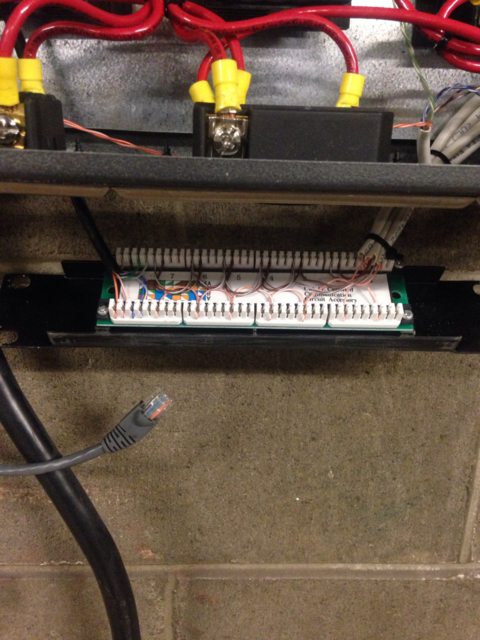
I only have 6

Boom. Unnecessary images I know, but I'm excited.
I only have 6
Boom. Unnecessary images I know, but I'm excited.
Jangeeva: can you run: lshw -c bus -xml
On your system, you have some exceptions which shouldn't happen.
Oh, thanks Doug... here.
root@beaglebone:~/beta_sb# lshw -c bus -xml
Bus error
Hmm, it appears you may have a bad kernel/module/driver combo. Hence why it errors. That's annoying.
Interesting. Works if I specify -disable dmi. I have no idea what this is :fro:
root@beaglebone:~/beta_sb# lshw -disable dmi -c bus -xml
<?xml version="1.0" standalone="yes" ?>
<!-- generated by lshw-B.02.16 -->
<!-- GCC 4.6.3 -->
<!-- Linux 3.8.13-bone50 #1 SMP Tue May 13 13:24:52 UTC 2014 armv7l -->
<!-- GNU libc 2 (glibc 2.13) -->
<list>
<node id="core" claimed="true" class="bus" handle="">
<description>Motherboard</description>
<physid>0</physid>
<capabilities>
<capability id="ti_am335x-bone" />
<capability id="ti_am33xx" />
</capabilities>
</node>
</list>
root@beaglebone:~/beta_sb#
Similar threads
- Replies
- 9
- Views
- 2K
- Replies
- 0
- Views
- 599
